Разработка электрооборудования механизма моста мостового крана
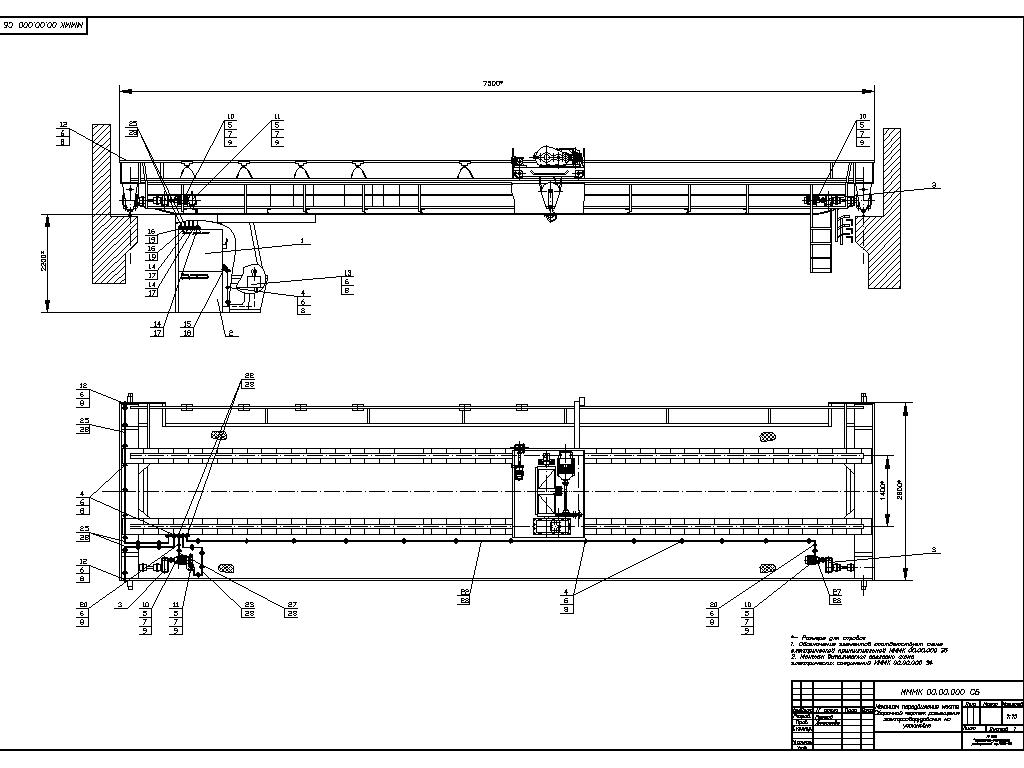
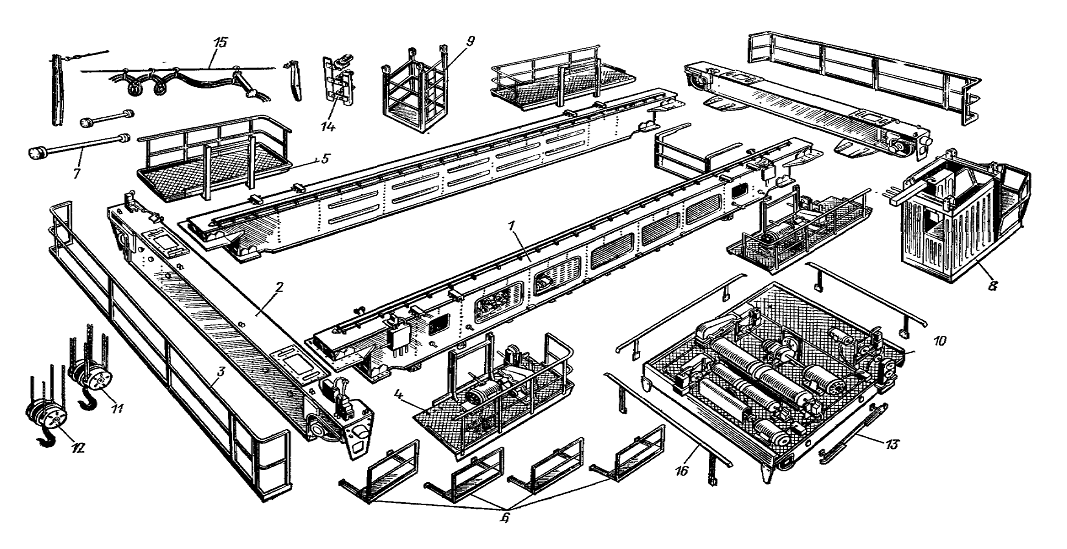
Механизм передвижения моста крана обеспечивает горизонтальное передвижение по рельсовому пути в обоих направлениях всего мостового крана.
Механизм устанавливается на главных балках металлоконструкции моста мостового крана, питание электрооборудования моста крана осуществляется с помощью троллеев, также со стороны противоположной расположению главных троллеев подвешивается кабина крановщика, с которой производится управление всеми механизмами мостового крана.
Мост крана совершает поступательно-возвратное движение по рельсовому пути на всю длину подкранового пути от одного крайнего положения до другого.
За исходное положение моста крана, принимаем нахождение его в одном из крайних положений на подкрановом пути, там где производится поднятие груза. Конечной точкой является противоположная сторона подкранового пути, там где груз будет опускаться. Движение осуществляться в одну сторону с грузом, в обратную без груз. Цикл работы состоит из начала движения с нулевой скорости до установившейся, движения на установившейся скорости и торможения моста крана. При дальнейшей работе механизма моста крана, цикл повторяется.
Исходя из условий и технических данных задания, принимаем кинематическую схему с с индивидуальным (раздельным) приводам механизма передвижения. Электродвигатель 1, соединенный муфтой 2 с редуктором 4, передает движения на ведущие колеса 7. Вал приводного колеса соединен с тихоходным валом редуктора промежуточным валом 6 и зубчатыми муфтами 5. На полумуфте быстроходного вала редуктора установлен тормоз 3. При такой схеме привода из конструкции механизма передвижения исключается громоздкий трансмиссионный вал с опорами и муфтами. Нагрузка между приводами распределяется равномерно, а суммарная мощность электродвигателей не превышает мощности одного центрального двигателя. При этом маховые моменты роторов двигателей уменьшаются, и облегчается пусковой режим. Электрическая схема включения двигателей обеспечивает синхронность их работы.
Введение
1 Техническая часть
1.1 Техническая характеристика механизма
1.1.1 Технологическое назначение
1.1.2 Описание принципа работы механизма и кинематической схемы
1.1.3 Основные технические параметры механизма
1.1.4 Условия эксплуатации электрооборудования
1.1.5 Технические требования к электроприводу и схеме управления
1.2 Разработка схемы электрической принципиальной силовой части электрооборудования
1.2.1 Выбор и обоснование системы электропривода механизма
1.2.2 Расчет мощности и выбор приводного электродвигателя
1.2.3 Расчет и выбор преобразователя
1.2.4 Обоснование и выбор структуры системы регулирования
1.2.5 Расчёт параметров элементов системы регулирования
1.3 Разработка схемы электрической принципиальной системы управления
1.3.1 Выбор и обоснование элементной базы схемы автоматики
1.3.2 Выбор рода тока, величины напряжений цепей управления
1.3.3 Разработка алгоритма работы схемы управления
1.3.4 Описание работы схемы электрической принципиальной
1.3.5 Расчёт и выбор электроаппаратуры
1.4 Разработка монтажа электрооборудования
1.4.1 Монтаж основного электрооборудования
1.4.2 Выбор элементов монтажа
1.4.3 Расчет и выбор проводов
Заключение
Список литературы
Софт: AutoCAD, docx